Star trackers are one of the most accurate celestial sensors used for absolute attitude determination.
The devices detect stars in captured images and accurately compute their projected centroids on an imaging focal plane with subpixel precision.
Traditional algorithms for star detection and centroiding often rely on threshold adjustments for star pixel detection and pixel brightness weighting for centroid computation.
However, challenges like high sensor noise and stray light can compromise algorithm performance.
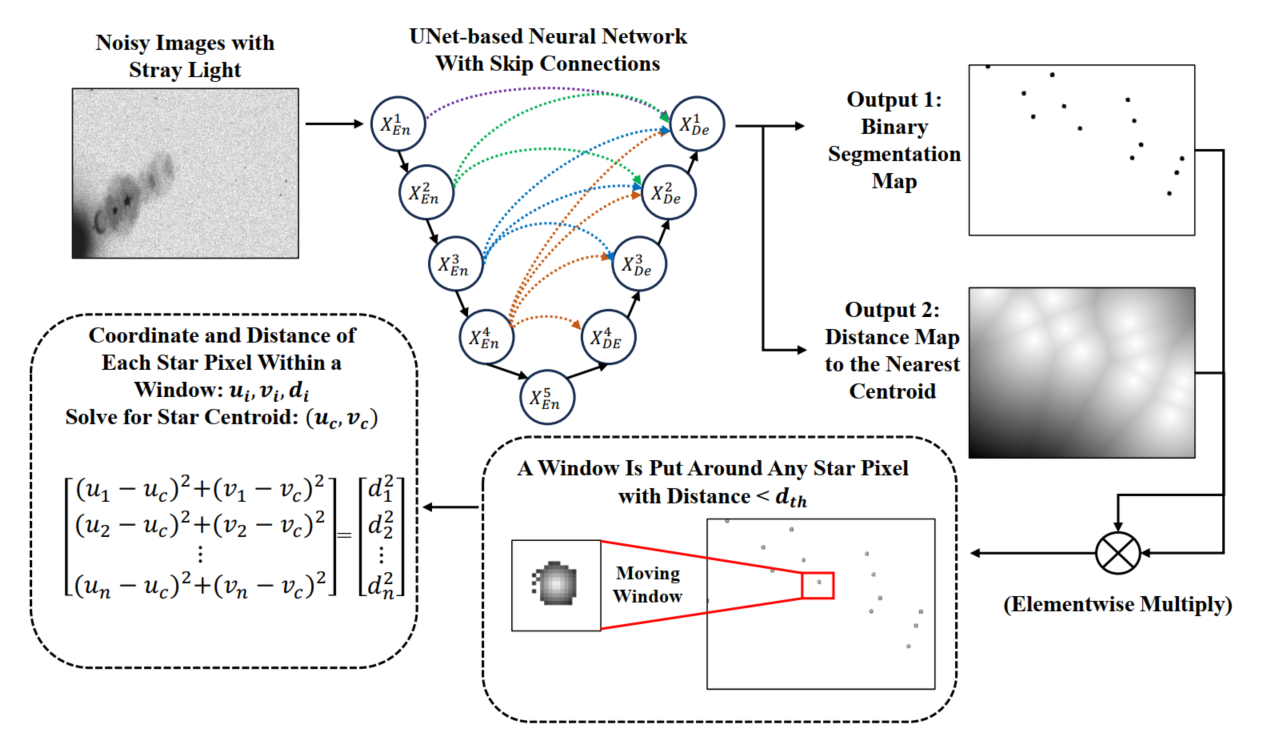
This article introduces a Convolutional Neural Network (CNN)-based approach for star detection and centroiding, tailored to address the issues posed by noisy star tracker images in the presence of stray light and other artifacts.
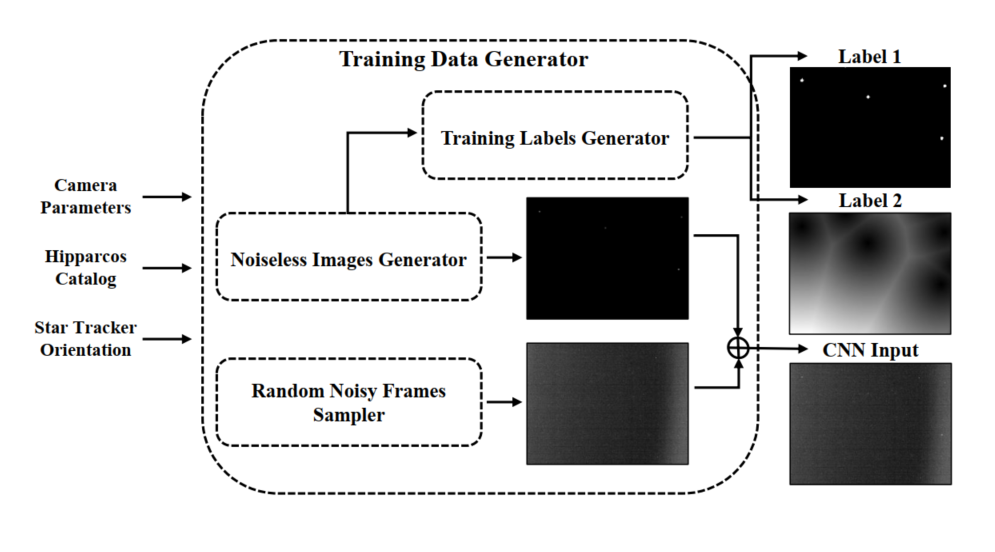
Trained using simulated star images overlayed with real sensor noise and stray light, the CNN produces both a binary segmentation map distinguishing star pixels from the background and a distance map indicating each pixel's proximity to the nearest star centroid.
Leveraging this distance information alongside pixel coordinates transforms centroid calculations into a set of trilateration problems solvable via the least squares method.
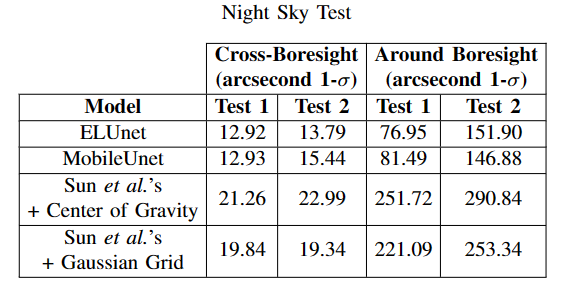
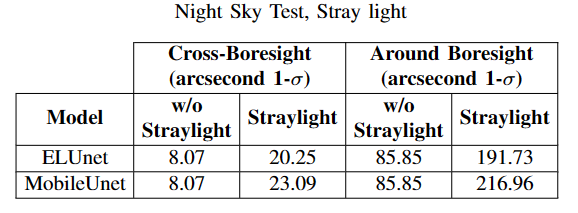
Our method employs efficient UNet variants for the underlying CNN architectures, and the variants' performances are evaluated.
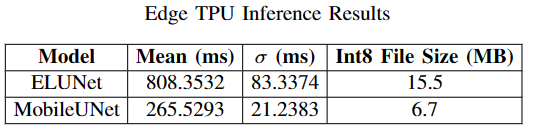
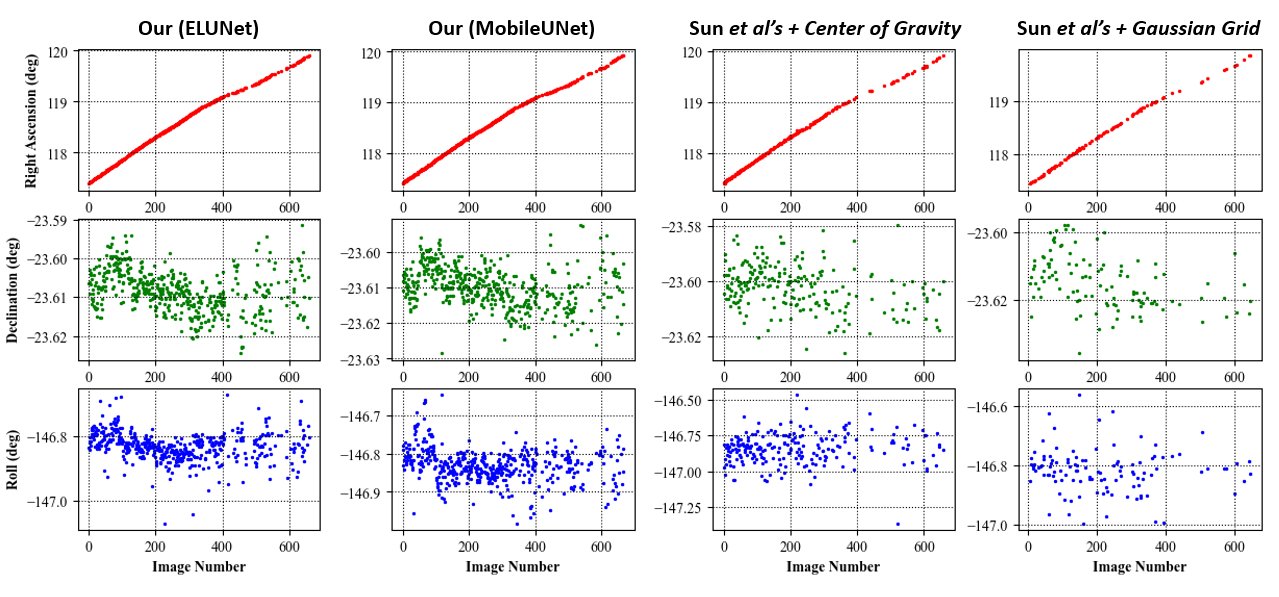
Comprehensive testing has been undertaken with synthetic image evaluations, hardware-in-the-loop assessments, and night sky tests. The tests consistently demonstrated that our method outperforms several existing algorithms in centroiding accuracy and exhibits superior resilience to high sensor noise and stray light interference. An additional benefit of our algorithms is that they can be executed in real-time on low-power edge AI processors.